- Liga Nacional de Robótica de Competición


Equipo formado por Rubén Espino (Ingeniero de Telecomunicación, Azuqueca de Henares), Javier Baliñas (Ingeniero en Electrónica, Coslada) y Javier Isabel (Ingeniero en Robótica, Toledo).
Puma Pride tiene sus orígenes en el año 2011, aunque inicialmente se llamaba "Imani" y estaba formado por Rubén y otros compañeros suyos de la universidad. Ese primer año se construyó la primera versión de Pumatrón, que era un robot rastreador e incluso autosoportado. Ya en su segunda competición (Robolid 2011) ganó para sorpresa de los favoritos, que por aquel entonces eran los integrantes de DPEbots.
Tras sucesivos éxitos en competiciones como Robolid y Cybertech en diferentes pruebas, en el 2012 ve la luz un primer prototipo de velocista, Speed Demon, con base de acero, diseñado y fabricado en 10 días y programado la noche anterior a Cosmobot 2012. El 12° puesto conseguido entre más de 20 robots y a poca distancia de robots que habían sido anteriormente campeones fue un éxito, teniendo en cuenta la poca experiencia de Rubén en esa prueba y la programación tan básica que llevaba el robot. Aun así, fue capaz de implementar aceleración en rectas la misma mañana de la competición.
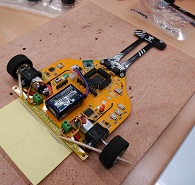
Ese año comenzó el diseño del nuevo chasis para Pumatrón, el que actualmente compite en la Liga, que serviría tanto para rastreador como para velocista simplemente con cambiarle el morro, las ruedas y los motores. En el 2013 estaban listos los primeros robots con el segundo chasis, pero no fue hasta el año siguiente, el 2014, cuando la versión 2 de Pumatrón se presentó a su primera competición de velocistas, Robolid 2014. Ni siquiera estaba inscrito un rato antes de empezar la prueba porque Rubén no había tenido tiempo de depurarlo y pensó que no tendría ninguna posibilidad contra los Smith llevando programado un algoritmo PD para seguir la línea y sin aceleración en recta, pero unas pruebas durante un tiempo otorgado por la organización para la reparación de Jools presagiaron un intenso duelo entre los Smith y Pumatrón, que acabó con la victoria de este último. El circuito era tan revirado que favorecía a los robots pequeños como Pumatrón y el reconocimiento de pista no servía de mucho, puesto que no había rectas para acelerar.
En la temporada 2014-2015 se unió al equipo Javier Baliñas, aportando un reconocimiento de pista en velocistas y carreras más fiable, y luchando hasta la última jornada con K2-Robotics por ganar la Liga. Puma Pride conseguiría el segundo puesto empatado a puntos con K2-Robotics.
La evolución de la prueba tradicional de velocistas a carreras en 2015 supuso una lotería en ciertos eventos, pero tras muchas pruebas depurando a Pumatrón, éste ganó en fiabilidad y hoy por hoy es el robot con más victorias de la Liga en carreras, conseguidas casi todas entre 2015 y 2017, sin más versiones del chasis que las requeridas para poder competir en carreras con los sensores de distancia y un lastre para ganar adherencia y evitar ser expulsado fácilmente de pista ante un choque.
Por su parte, Minitauro lleva compitiendo en minisumo desde Robolid 2014. En sus inicios era un robot muy fuerte, con 17Kg de par teórico, más que cualquier otro robot de minisumo. Pero la sobrealimentación de los motores provocaba la rotura de las reductoras con facilidad. Consiguió la victoria en Malakabot 2015, OSHWDem 2015 y OSHWDem 2016.
Actualmente, Minitauro ha sufrido algunas remodelaciones, pasando de las 4 ruedas originales del chasis Cobra de FingerTech Robotics a un chasis hecho a medida con impresión 3D, 2 ruedas y unos motores con la reductora más resistente.
En la novena temporada, Javier Isabel, veterano constructor de humanoides, se unió al equipo para unir fuerzas e intentar ganar la Liga cubriendo todas las categorías. Tras la octava temporada con su monopolio en las pruebas de humanoides, fue una gran ventaja para el equipo contar con Javier y su robot, Raider. El desarrollo de éste comenzó en 2013, con el objetivo de crear una plataforma humanoide equipada con cámara y sobre la que implementar algoritmos de visión artificial. Su diseño es totalmente Open-Source. Desde sus inicios ha sufrido diferentes modificaciones para adecuarse a distintas competiciones. Fuera de la Liga ha participado en pruebas de navegación, visión y sumo funcionando de forma autónoma; y fútbol robótico telecontrolado. A día de hoy es el robot humanoide con mejor palmarés de la Liga.